数字电路设计基础 验证三要素:
灌激励:产生输入信号
集响应:收集输出信号
作比较:比较结果
Testbench送激励最好是下降沿 送激励
FSM
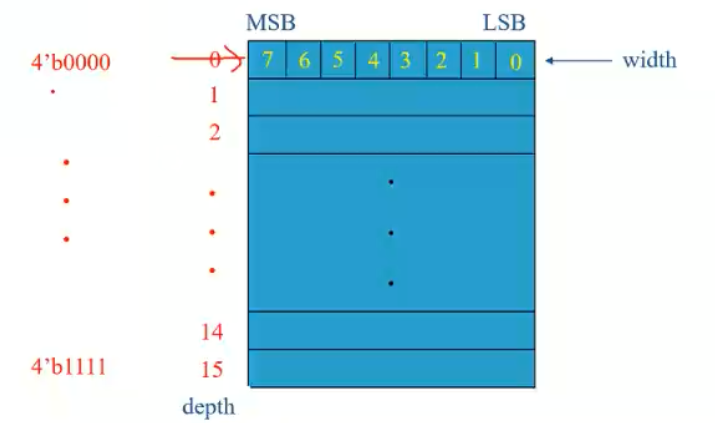
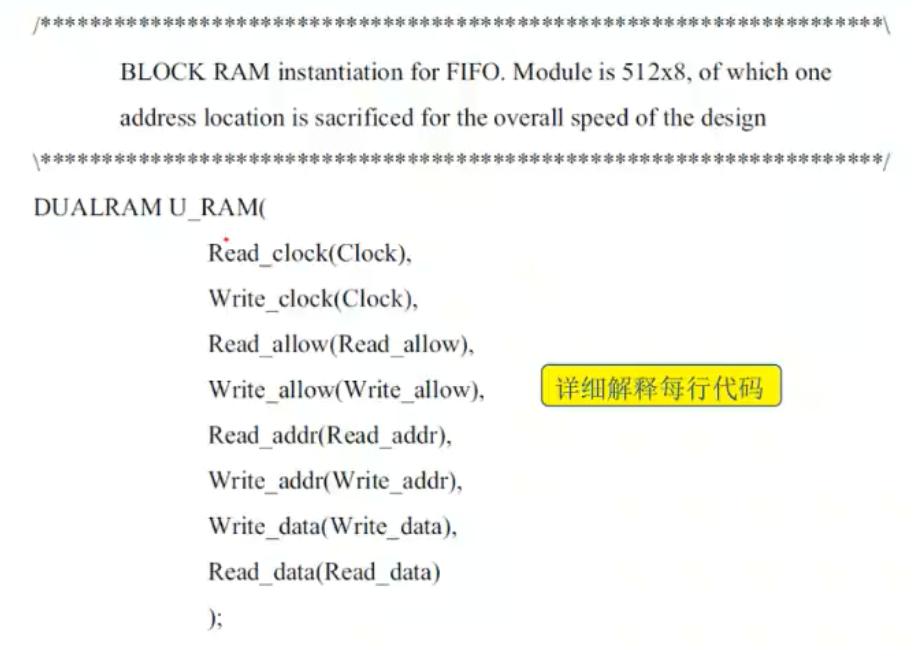
2.1 RAM的设计 一个16x8的双端口RAM
RAM宽度8bit
RAM深度16
ADDR位宽2^4,取值范围0~15
双端口RAM端口列表:
公共:reset
写:w_clk, w_en, w_addr, w_data
读:r_clk, r_en, r_addr, r_data
单端口RAM端口列表:
公共:clk, rst_n, addr, wr_en
写:w_data
读:r_data
2.2 FIFO FIFO的作用:
对连续的数据流进行缓存,防止在进机和存储操作时丢失数据;
数据集中起来进行进机和存储,可避免频繁的总线操作,减轻CPU的负担;
允许系统进行DMA操作,提高数据的传输速度。这是至关重要的一点 ,如果不采用DMA操作,数据传输将达不到传输要求,而且大大增加CPU的负担,无法同时完成数据的存储工作
比如FIFO的一端时AD数据采集,另一端时计算机的PCI总线,假设其AD采集的速率为16位100KBPS,那么每秒的数据量为100K×16bit=1.6Mbps,而PCI总线的速度为33MHz,总线宽度32bit,其最大传输速率为1056Mbps,在两个不同的时钟域间就可以采用FIFO来作为数据缓冲
同步FIFO与异步FIFO:
同步/sync_fifo:写和读都在一个clock下工作
异步/asyn_fifo:写和读不在一个clock下工作
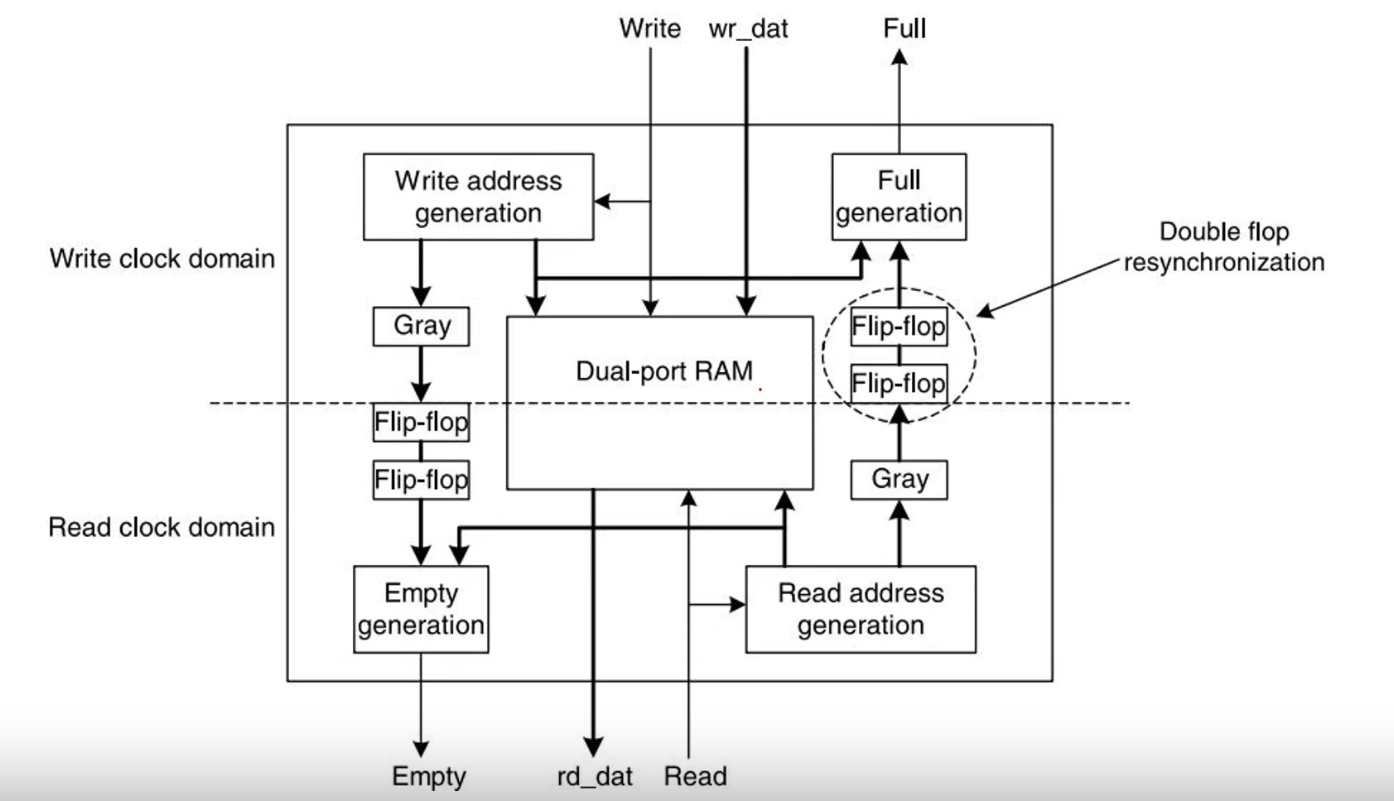
FIFO的原理:
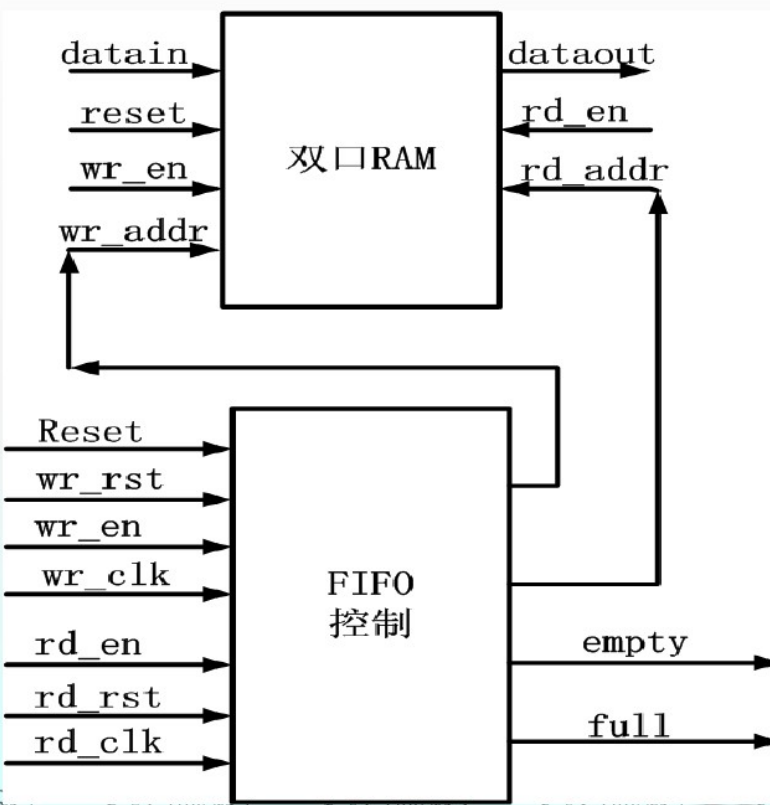
FIFO结构图:
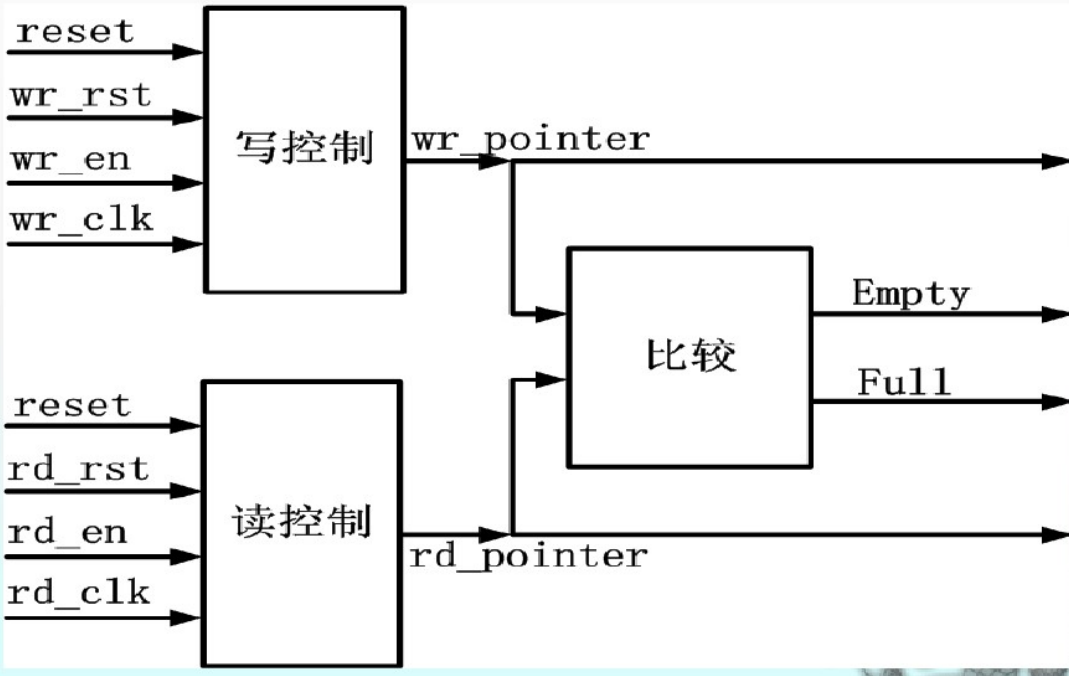
FIFO control:作用是产生读写指针和full,empty信号
空满标志的意义:
满信号 有效表示FIFO已经处于满状态,不能再执行写入动作
空信号 有效表示FIFO处于空状态,这时没有有效数据可以读出
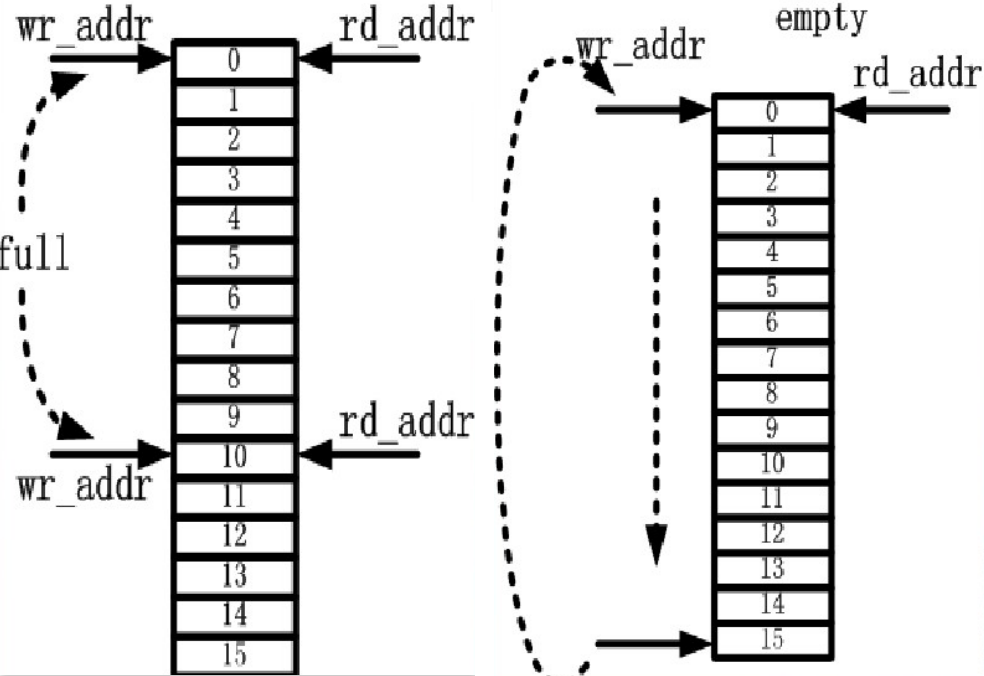
正确产生空/满标志是整个FIFO设计的最关键部分,这部分的好坏直接影响着整个FIFO的性能,空/满标志产生的原则是 :当整个FIFO被写满时而不会溢出,当整个么FIFO被读空时而不会多读。之
每进行一次读写操作 ,相应的指针就增加一次,指向下一个位置。当指针移动到最后的位置时,它又重新回到初始位置。
FIFO非空或非满的状态 下,这个过程将随着读写控制信号的变化一直变化下去。如果FIFO处于空状态,再进行一个读出动作会产生向下溢出(underflow ),一个无效的数据被读出;样地,对于一个写满的FIFO如果进行一个写入动作,会产生向上溢出(overflow ),一个有用的数据会被新写入。这会导致先前的数据被覆盖。为了避免这种错误的产生,应该对FIFO设置满和空两个信号
关于溢出与空满的另外一种解释:
空信号: 我们可以想象一下当写信号较慢的时候,读信号较快,那么读信号指针就会追上写信号指针则会产生EMPTY的空信号。或者reset复位时也是空信号。、
满信号: 当写指针快于读指针,写信号较快,很容易使得写指针越过最大深度后追上读指针,那么就会产生满溢出信号。
如何判断是空是满?
是写指针从后面追上了读指针
还是读指针从后面追上了写指针
一种同步FIFO的设计方法: 将读/写地址寄存器扩展一位,将最高位设置为状态位,其余低位作为地址位,指针由地址位以及状态位组成 。
0 ]==r_ptr[n:0 ])1 :0 ]==r_ptr[n-1 :0 ]&&w_ptr[n]!r_ptr[n])
FIFO MEM
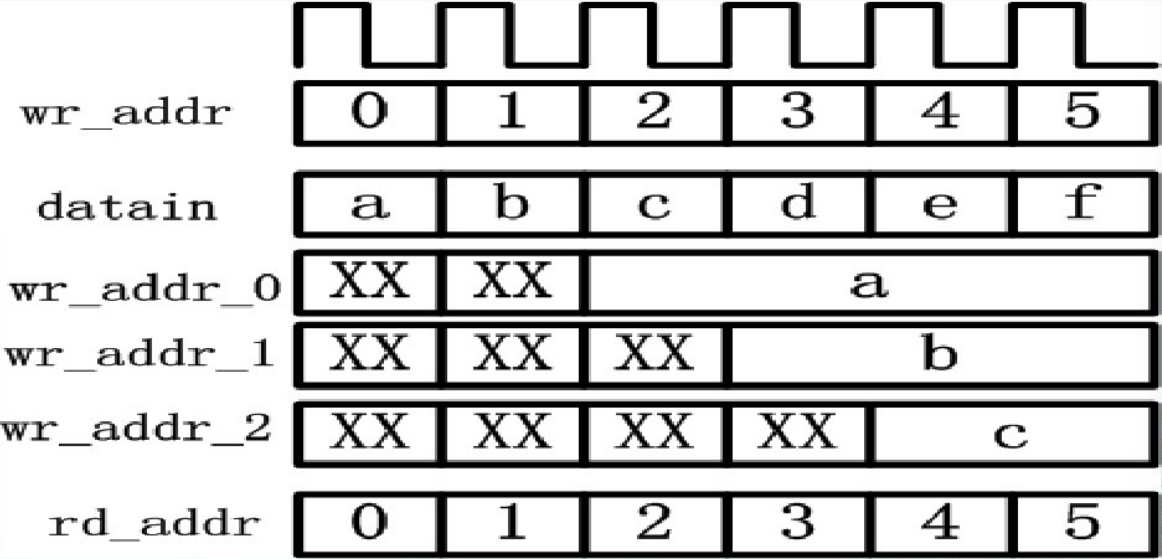
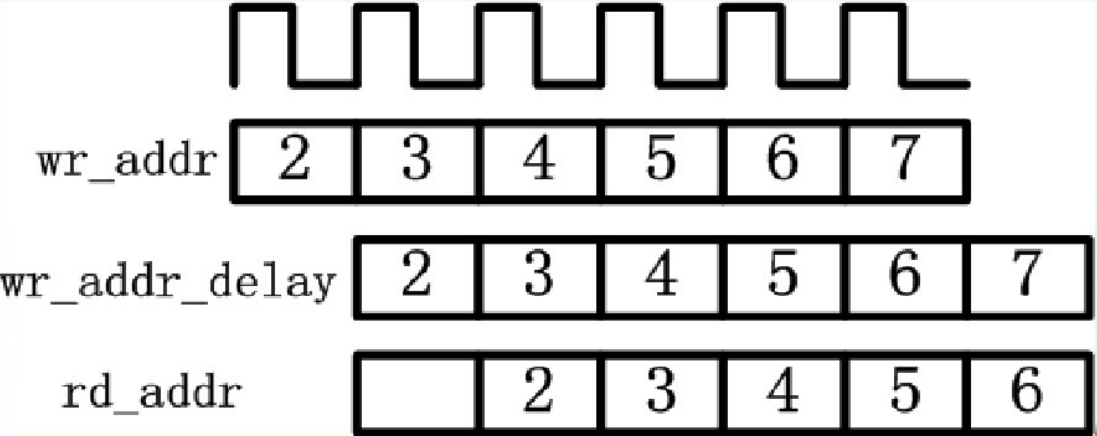
写和读的时间差:
读和写的使能:
如果读写地址不同,读写使能同为1时,读不会延迟两个clock。
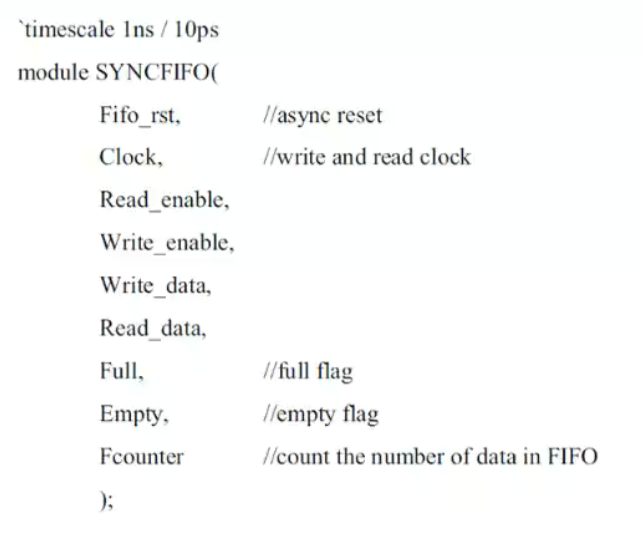
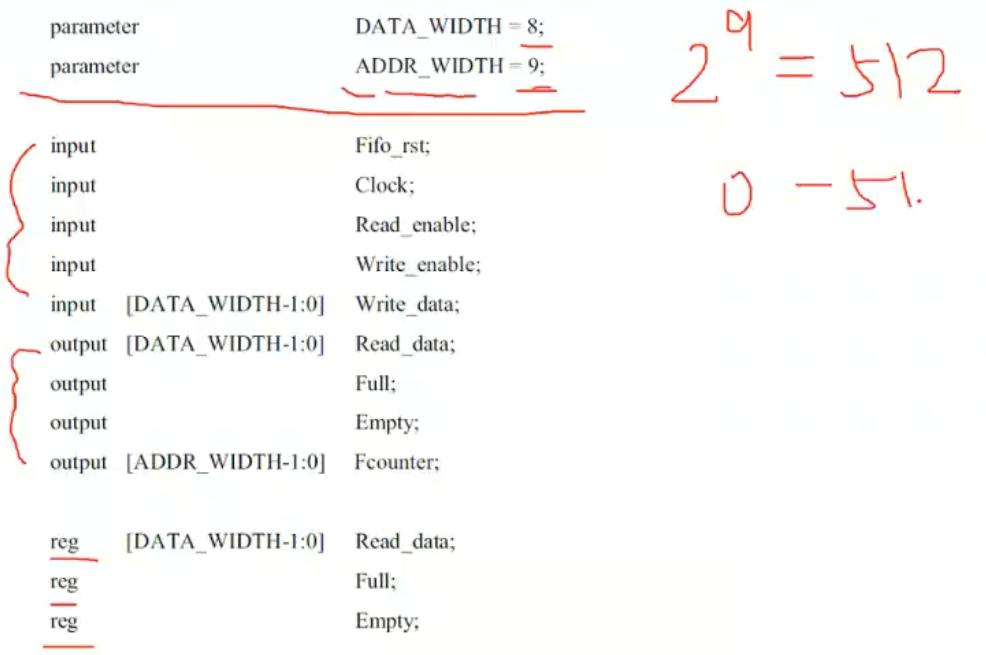
2.3 同步FIFO的设计
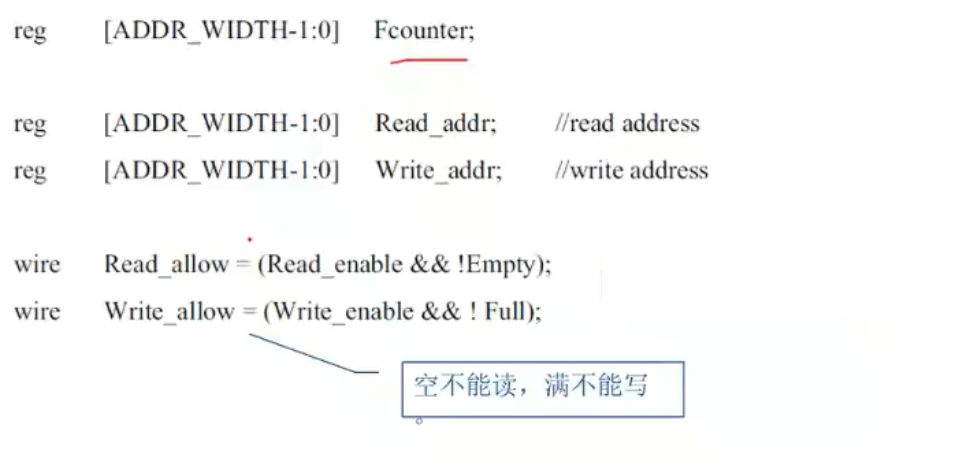
FIFO原则:满不能写,空不能读
关键:full和empty信号是如何产生的
方法:
方法1:用长度计数器factor。执行一次写操作,factor加1,执行一次读操作,factor减1
满的时候:factor=depth;空的时候:factor=0
方法2:地址位扩展一位,用最高位来判断空满
空信号:读和写地址相同的时候
满信号:waddr超了一圈且赶上raddr时full
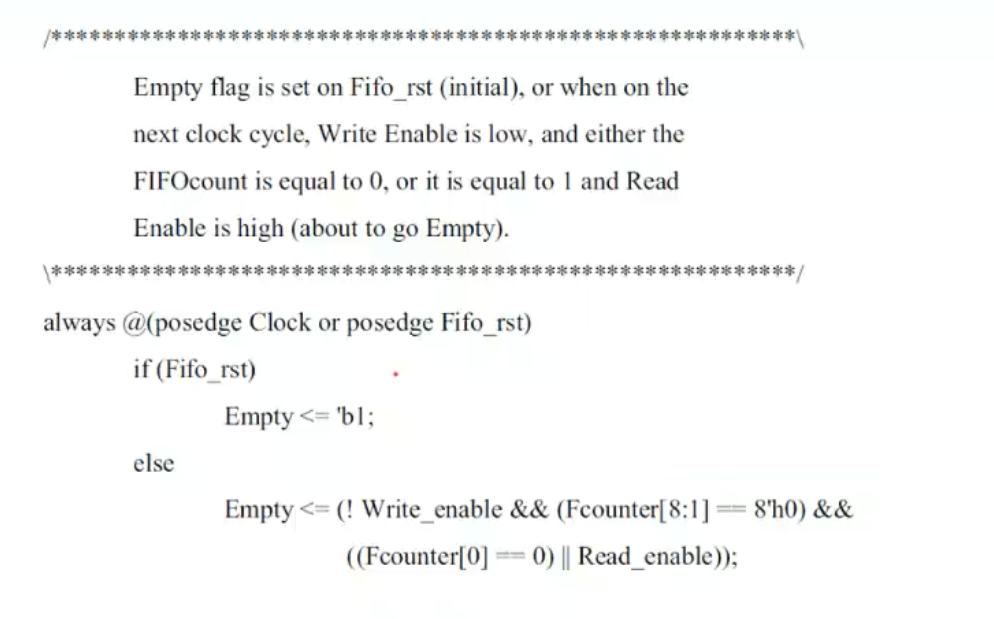
方法一:计数器
原理:
复位状态下空为1
正常工作状态下,空状态判断
就是空:计数器为0、没有在写数据
空往外面读一个 :计数器为1、正在读数据、没有在写数据
原理:
复位状态为0
正常工作状态下,满状态判断
已经是满:计数器全1、没有在读数据
正在变为满:计数器除了最低位全为1、正在写数据、没有在读数据
示例源码:
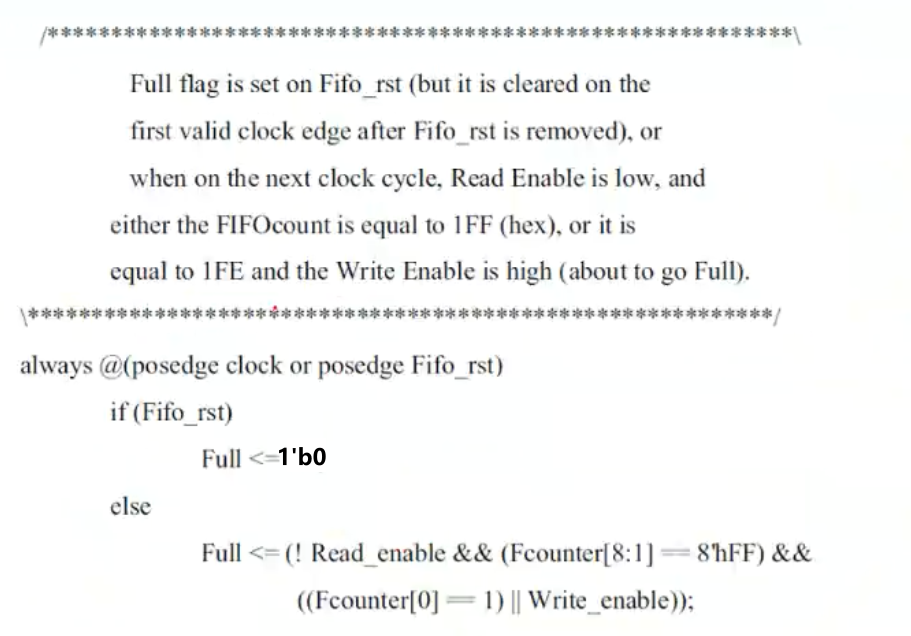
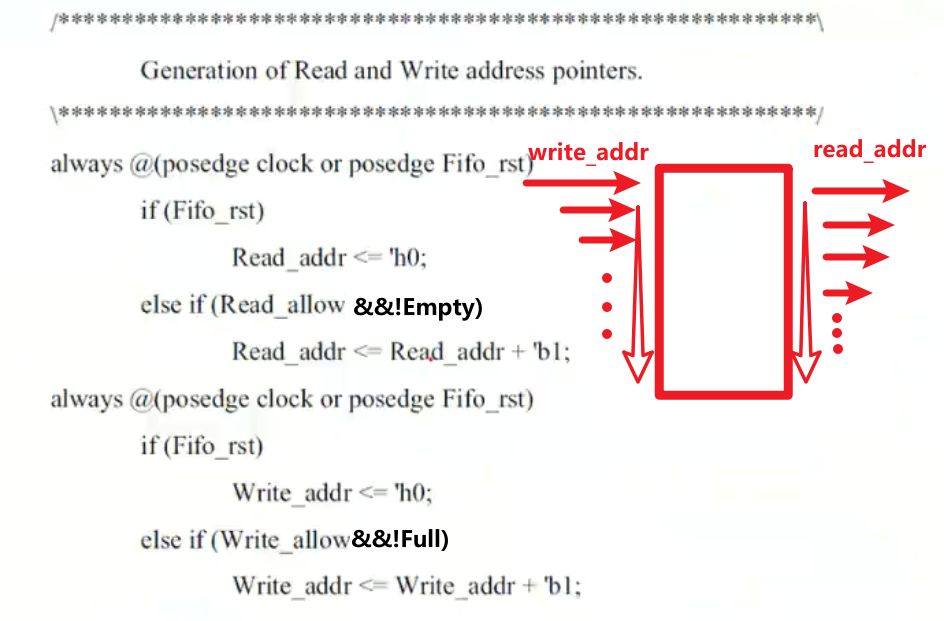
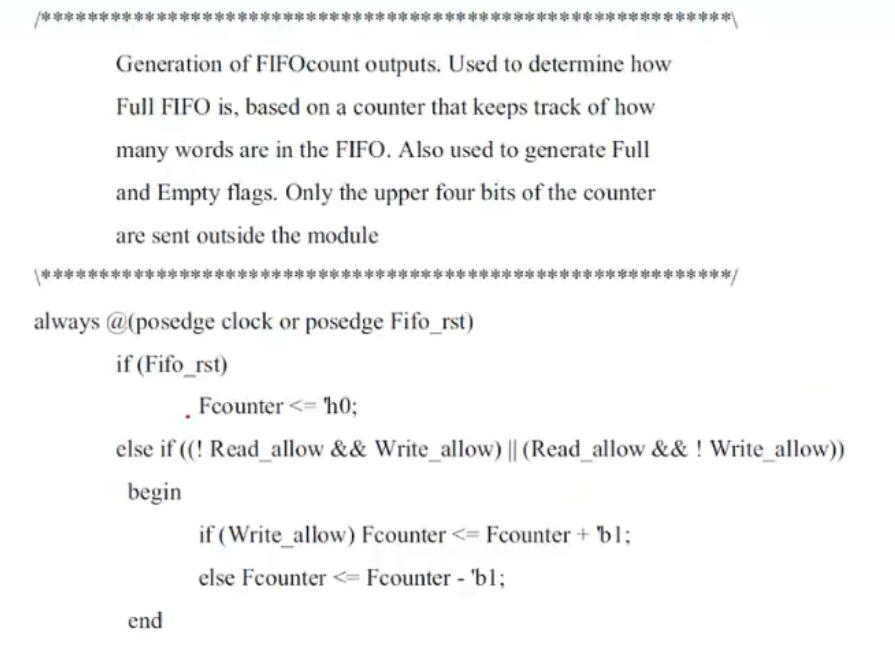
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 `timescale 1ns/10ps module SYNCFIFO#(parameter DATA_WIDTH = 8 ,9 )input wire fifo_rst, input wire clock, input wire read_enable, input wire write_enable,input reg [DATA_WIDTH-1 :0 ] write_data,output reg [DATA_WIDTH-1 :0 ] read_data,output reg full, output reg empty, output reg [ADDR_WIDTH-1 :0 ] fcounterwire read_allow = (read_enable && !empty); wire write_allow = (write_enable && !full); .write_clock (clock),.read_clock (clock),.write_allow (write_allow),.read_allow (read_allow),.read_addr (read_addr),.write_addr (write_addr),.write_data (write_data),.read_data (read_data)always @(posedge clock or posedge fifo_rst)if (fifo_rst)'b1 ;else 8 :1 ] == 8'h0 ) && 0 ] == 0 )||read_enable));always @(posedge clock or posedge fifo_rst)if (fifo_rst)'b1 ;else 8 :1 ] == 8'hFF ) && 0 ] == 1 )||write_enable));always @(posedge clock or posedge fifo_rst)if (fifo_rst)'h0 ;else if (read_allow)'b1 ;always @(posedge clock or posedge fifo_rst)if (fifo_rst)'h0 ;else if (write_allow)'b1 ;always @(posedge clock or posedge fifo_rst)if (fifo_rst)'h0 ;else if ((!read_allow && write_allow)||(read_allow && !write_allow))begin if (write_allow) fcounter <= fcounter + 'b1 ;else fcounter <= fcounter - 'b1 ;end endmodule
方法二:地址位扩展一位 原理
空信号:读和写地址相同的时候
满信号:waddr超了一圈且赶上raddr时full
示例源码:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 `timescale 1ns/10ps module sync_fifo(input clk,input [7 :0 ] data_in,output reg [7 :0 ] data_out,output empty,reg [7 :0 ] mem[15 :0 ]; wire [3 :0 ] w_addr, w_addr;reg [4 :0 ] r_addr_a, w_addr_a;assign r_addr = r_addr_a[3 :0 ];assign w_addr = w_addr_a[3 :0 ];always @(posedge clk or negedge rst) begin if (!rst) 5'b0 ; else begin if (rd_en == 1 && empty == 0 ) begin 1 ; end end end always @(posedge clk or negedge rst) begin if (!rst) 5'b0 ; else begin if (wr_en == 1 && full == 0 ) begin 1 ; end end end assign empty = (r_addr_a == w_addr_a) ? 1 : 0 ;assign full = (r_addr_a[4 ] != w_addr_a[4 ] && r_addr_a[3 :0 ] == w_addr_a[3 :0 ]) ? 1 : 0 ;endmodule
2.4 异步FIFO的设计(某课网)
使用扩展地址位的方式判断空满
读写信号时钟不同,带来的跨时钟域关键问题:
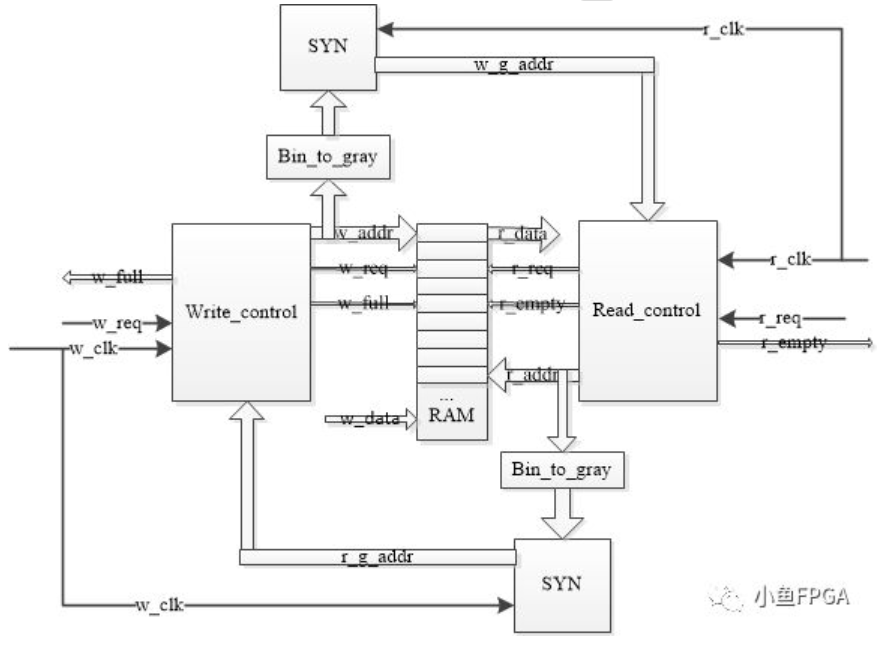
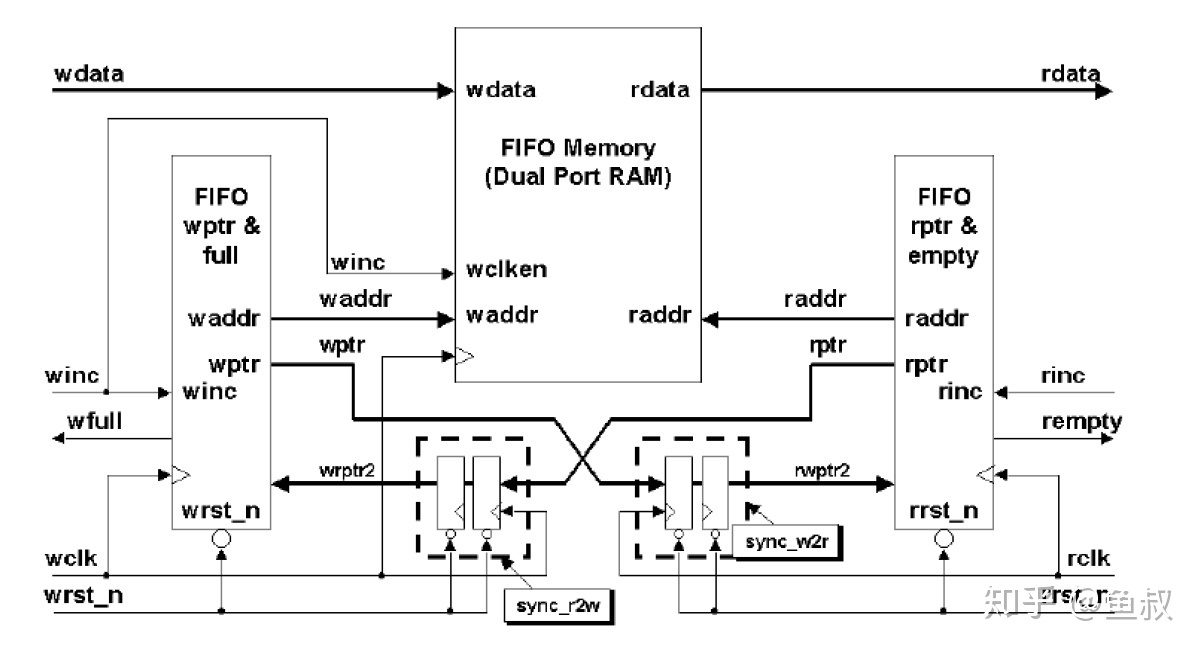
整体结构
Write_control:控制写操作与满信号(w_full)的判断与产生。
Read_control:控制读操作与空信号(r_empty)的判断与产生。
RAM:双端口数据存取RAM。
Bin_to_gray:二进制码转格雷码模块。用于将读写地址二进制码转成格雷码。
SYN:跨时钟同步模块,即将读地址的格雷码(r_g_addr)向w_clk同步;将写地址的格雷码(w_g_addr)向r_clk同步。主要操作就是通过寄存器打两拍
关键点解释:
跨时钟域传递信号做时钟同步一般通过打两拍。
采用格雷码编码(解决汇聚问题),因为格雷码每次跳转只会有一位发生变化,所以如果出现不确定状态也只会有两种状况,即正确变化了和不变。因此在读写时钟不一样的情况下,纵使读写地址每bit同步过程中出现延时不一致,也不会使得FIFO在实际空或者满之后,FIFO却没有正确的产生出空满信号。只有可能是实际没有空或者满,但产生了空满信号,但这对于FIFO的功能不会有影响,只会使得FIFO的读或者写操作暂停。
读比写时钟更快,只会只出现实际没满,但误判为满;不会对功能(数据流)造成错误。
写比读时钟更快,只会出现实际没空,但误判为空;不会对功能(数据流)造成错误。
示例源码 源码1
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 module gray(input [4 :0 ] b_in,output [4 :0 ] g_outassign g_out[4 ] = b_in[4 ];assign g_out[3 ] = b_in[3 ];assign g_out[2 ] = b_in[3 ]^b_in[2 ];assign g_out[1 ] = b_in[2 ]^b_in[1 ];assign g_out[0 ] = b_in[1 ]^b_in[0 ];endmodule module fifo(input [7 :0 ] data_in, input rclk, wclk, output reg [7 :0 ] data_out,output reg halffull, output empty, reg [7 :0 ] mem[15 :0 ];wire [3 :0 ] w_addr, r_addr; wire [4 :0 ] w_addr_g, r_addr_g; reg [4 :0 ] w_addr_b, r_addr_b; reg [4 :0 ] w_addr_r, r_addr_w; .b_in (w_addr_b),.g_out (w_addr_g));.b_in (r_addr_b),.g_out (r_addr_g));assign w_addr = w_addr_b[3 :0 ];assign r_addr = r_addr_b[3 :0 ];always @(posedge rclk or negedge rst)begin if (!rst) begin 5'b0 ;5'b0 ;end else begin if (rd_en == 1 && empty == 0 ) begin 1 ; end end end always @(posedge wclk or negedge rst)begin if (!rst) begin 5'b0 ;5'b0 ;end else begin if (wr_en == 1 && full == 0 ) begin 1 ; end end end assign empty = (r_addr_g == r_addr_w) ? 1 : 0 ;assign full = (w_addr_g[4 ] != w_addr_r[4 ] && 3 :0 ] == w_addr_r[3 :0 ] ? 1 : 0 ) ? 1 : 0 ;endmodule
源码2
top module:asyn_fifo.v
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 module asyn_fifo #(parameter DEPTH = 256 , parameter WIDTH_A = 8 , parameter WIDTH_D = 16 input w_clk,input rst_n,input w_req,input [WIDTH_D-1 :0 ] w_data,input r_clk, input r_req, output [WIDTH_D-1 :0 ] r_data,output w_full , output r_empty wire [WIDTH_A:0 ] w_addr;wire [WIDTH_A:0 ] r_gaddr_syn;wire [WIDTH_A:0 ] r_addr;wire [WIDTH_A:0 ] w_gaddr;wire [WIDTH_A:0 ] r_gaddr;wire [WIDTH_A:0 ] w_gaddr_syn;.WIDTH_A (WIDTH_A) .w_clk ( w_clk ), .w_rst ( rst_n ), .w_req ( w_req ), .r_gaddr ( r_gaddr_syn ), .w_full ( w_full ), .w_addr ( w_addr ), .w_gaddr ( w_gaddr ) .DEPTH (DEPTH ), .WIDTH_A (WIDTH_A), .WIDTH_D (WIDTH_D) .r_clk ( r_clk ) , .w_clk ( w_clk ) , .rst_n ( rst_n ) , .w_addr ( w_addr[WIDTH_A-1 :0 ] ) , .w_data ( w_data ) , .w_en ( w_req & (!w_full) ) , .r_addr ( r_addr[WIDTH_A-1 :0 ] ) , .r_en ( r_req & (!r_empty) ) , .r_data ( r_data ) .WIDTH_D (WIDTH_A) .syn_clk ( r_clk ) , .syn_rst ( rst_n ) , .data_in ( w_gaddr ) , .syn_data ( w_gaddr_syn ) .WIDTH_D (WIDTH_A) .syn_clk ( w_clk ) , .syn_rst ( rst_n ) , .data_in ( r_gaddr ), .syn_data ( r_gaddr_syn ) .WIDTH_A (WIDTH_A) .r_clk ( r_clk ), .r_rst ( rst_n ), .r_req ( r_req ), .w_gaddr ( w_gaddr_syn ), .r_empty ( r_empty ), .r_addr ( r_addr ), .r_gaddr ( r_gaddr ) endmodule
sub module:bin_to_gray.v RAM.v syn.v read_part.v write_part.v
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 module bin_to_gray #(parameter WIDTH_D = 5 input [WIDTH_D-1 :0 ] bin_c,output [WIDTH_D-1 :0 ] gray_cwire h_b;assign h_b = bin_c[WIDTH_D-1 ]; reg [WIDTH_D-2 :0 ] gray_c_d;integer i; always @( * )for ( i=0 ;i<WIDTH_D-1 ;i=i+1 )1 ]; assign gray_c = {h_b,gray_c_d};endmodule
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 module RAM #(parameter DEPTH = 256 ,parameter WIDTH_A = 9 ,parameter WIDTH_D = 16 input r_clk,input w_clk,input rst_n,input [WIDTH_A-1 :0 ] w_addr, input [WIDTH_D-1 :0 ] w_data,input w_en,input [WIDTH_A-1 :0 ] r_addr,input r_en,output reg [WIDTH_D-1 :0 ] r_datareg [15 :0 ] mem[0 :DEPTH-1 ];integer i;always @( posedge w_clk )if ( !rst_n )for (i=0 ;i<DEPTH;i=i+1 )'h0000 ;else if ( w_en )always @( posedge r_clk )if ( !rst_n )'h0000 ;else if ( r_en )endmodule
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 module read_part #(parameter WIDTH_A = 8 input r_clk, input r_rst, input r_req, input [WIDTH_A:0 ] w_gaddr, output r_empty , output reg [WIDTH_A:0 ] r_addr , output reg [WIDTH_A:0 ] r_gaddr always @( posedge r_clk ) if ( !r_rst ) 'h00 ; else if ( r_req&&(!r_empty) ) 1'b1 ; wire [WIDTH_A:0 ] r_gaddr_w; .WIDTH_D (WIDTH_A+1 ) .bin_c ( r_addr ), .gray_c ( r_gaddr_w ) always @( posedge r_clk )if ( !rst_n )'h0 ;else assign r_empty = (w_gaddr==r_gaddr_w)?1'b1 :1'b0 ; endmodule
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 module write_part #(parameter WIDTH_A = 8 input w_clk,input w_rst,input w_req,input [WIDTH_A:0 ] r_gaddr,output w_full ,output reg [WIDTH_A:0 ] w_addr ,output reg [WIDTH_A:0 ] w_gaddr always @( posedge w_clk )if ( !w_rst )'h00 ;else if ( w_req&&(!w_full) )1'b1 ;wire [WIDTH_A:0 ] w_gaddr_w;.WIDTH_D (WIDTH_A+1 ) .bin_c ( w_addr ), .gray_c ( w_gaddr_w ) always @( posedge w_clk )if ( !rst_n )'h0 ;else assign w_full = ({~w_gaddr_w[WIDTH_A],~w_gaddr_w[WIDTH_A-1 ],w_gaddr_w[WIDTH_A-2 :0 ]}==r_gaddr)?1'b1 :1'b0 ;endmodule
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 module syn #(parameter WIDTH_D = 5 input syn_clk,input syn_rst,input [WIDTH_D:0 ] data_in,output [WIDTH_D:0 ] syn_datareg [WIDTH_D:0 ] syn_reg_1,syn_reg_2;always @( posedge syn_clk )if ( !syn_rst ) begin 'h00 ;'h00 ;end else begin end assign syn_data = syn_reg_2;endmodule
异步FIFO可能出现的问题 FIFO产生empty和full的信号,读的一侧需要将写的一侧的地址同步过来,进行两侧地址的比较,由于读和写是两个不同的时钟,可能会导致同步过来的地址发生错误。因此地址需要经过格雷码的转换
2.4 异步FIFO(b站) 跨时钟域不能把写指针和读指针直接进行比较
左边写指针、满信号产生
右边读指针、空信号产生
读写指针跨时钟域到对方的信号产生模块中的步骤:
先经过二进制2格雷码转换
再打两拍(为什么打两拍,因为格雷码只有一位不同,打两拍就够了)
到对方时钟域,进行读写/写读指针比较,进而生成空/满比较